2 月 16 日消息,特斯拉的新自动驾驶计算机,即硬件 4.0(HW4)已经泄露,该公司似乎已经在制造一些带有新系统的 。
我们已经知道,特斯拉准备升级其自动驾驶硬件已有一段时间了。特斯拉此前向联邦通信委员会申请在其车辆上增加一个新的雷达,并称计划在 1 月份开始销售,新的雷达将意味着特斯拉计划更新其 Autopilot 和 FSD 的传感器套件。
硬件变化对特斯拉车主来说是一种压力,因为该 制造商一直承诺,其自 2016 年以来制造的所有车辆都具备通过软件更新实现自动驾驶所需的所有硬件。事实证明并非如此,因为特斯拉需要更强大的计算机,于是推出了 HW3,不过该公司也确实向现有车主免费提供了升级。
特斯拉首席执行官埃隆-马斯克此前已经证实,特斯拉将不提供对 HW4 的免费升级,但他表示仍然计划用 HW3 实现其自动驾驶的承诺,HW4 只会将性能推得更高。
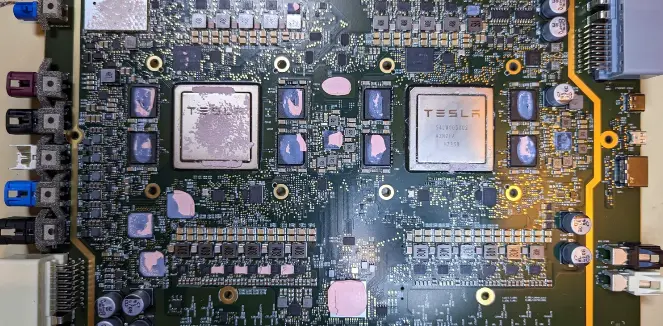
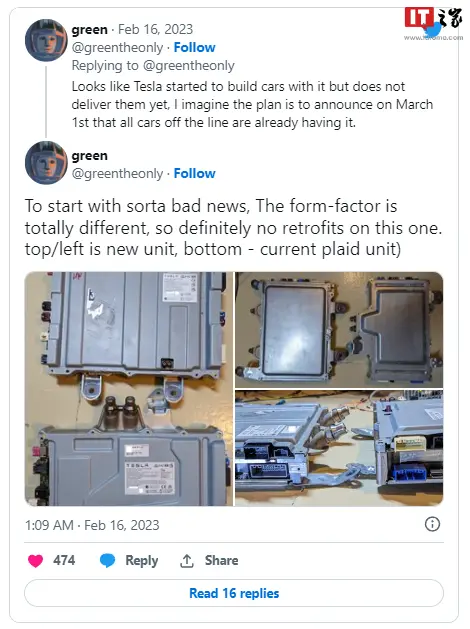
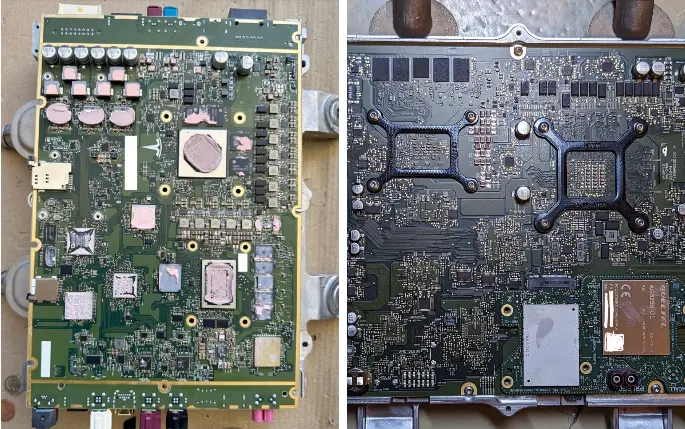
博主 Green The Only 设法从一辆新的 Model X 上获得了一个新的 HW4 电脑,并对其进行了拆解。他表示对比 HW3.0,4.0 硬件尺寸变大了,接口完全不一样,之前的 3.0 无法升级,这也符合之前马斯克的说法。
特斯拉的自动驾驶电脑与信息娱乐电脑结合在一起,后者也在这次 HW4 升级中得到了更新。Green 在谈到这一变化时说:“与目前的设备相比,信息娱乐系统被重新设计了。GPU 现在在同一块板上,所以不再有 GPU 子板。这使得整个装置更薄,其它没有变化 —— 同样的 256G NVMe 存储和 16G 内存,同样的 AMD CPU 和 GPU。”
至于特斯拉 HW4 计算机本身,Green 称其升级幅度比其预期的更小,仍然基于三星 Exynos-IP,不过这次将 CPU 内核从 12 个增加到 20 个(5 个集群,每个集群 4 个内核),最大频率为 2.35GHz,闲置频率为 1.37GHz,TRIP 内核数量从 2 个增加到 3 个,2.2GHz 最大频率。
不过他注意到,HW4 在安全方面有一些改进。但同时新的电路板在空闲时比 HW3 有更高的耗电量,此外特斯拉还对系统的冗余度进行了改进,配置都是双份,主板的整体设计也是非常对称,这在自动驾驶 中显然很重要。

传感器方面,主板的接口可以给我们提供更多关于 HW4 中新传感器的信息。特斯拉一直在向基于视觉(摄像头)的方法发展,曾大张旗鼓地取消了其雷达和超声波传感器。
而 HW4 显示,特斯拉似乎要增加更多的摄像头。目前,特斯拉的硬件套件中有 8 个摄像头,但现在新电脑有 12 个摄像头的接口,尽管一个接口被标记为“备用”。从接口的命名推测来看,特斯拉会把前挡风摄像头改为两个,同时新增两个侧摄像头以及一个前杠摄像头,暗示特斯拉有可能提供 360 环视功能。
此外,GPS 模块应该也有所升级,现在是三频 GPS 天线模块。
最后,Green 还发现了特斯拉将雷达重新整合到其传感器套件中的证据,HW4.0 有前向雷达以及雷达加热系统。
IT之家了解到,马斯克在去年 6 月特斯拉停止使用其雷达后曾称,纯视觉的安全性会比视觉 + 雷达高,而不是低。视觉已经变得如此之好,以至于雷达实际上减少了信号 / 噪音。不过他也表示,如果有一个“非常高分辨率的雷达”,特斯拉仍可能使用雷达。
目前还不清楚特斯拉计划何时正式发布新的 HW4,但 3 月 1 日投资者日可能是一个好时机。
【来源:IT之家】